Zadání úlohy
Úloha Lávka
Cílem úlohy je sestavit a naprogramovat robota tak, aby se mohl samostatně bez jakékoliv další pomoci přejet po lávce od startu do cíle v co nejkratším čase.
Na stolech rozměru 9 x 6 polí bude sestavena cesta z bloků 28 x 28 cm výšky 4 cm. Bloky se budou dotýkat vždy jednou stranou bez překrytí. Úkolem robotů bude projet 2 okruhy v co nejkratším čase. Maximální čas pro jízdu je 90 vteřin. Robot se nesmí dotknout základní desky stolu hnacím kolem, pásem, čí jiným pohybovým ústrojím. V případě opuštění lávky, nebo překročení časového limitu se počítá počet projetých polí směrem k cíli do místa opuštění lávky. Jedno pole lze započítat pouze jednou. Robot musí v soutěži postupovat dle programu samostatně a nesmí být žádným způsobem ovládán.
Soutěže se zúčastní maximální počet 24 týmů v pořadí podle času přihlášení.
Konstrukce robota
Ke konstrukci robota lze využít pouze dílů z uvedených stavebnic:
- Základní souprava LEGO MINDSTORMS Education (9797), soupravy technických dílů (9648 nebo 9695) – doplňkové pasivní díly, síťový adaptér (9833 nebo 8887).
- Základní souprava LEGO MINDSTORMS Education 45544 EV3, soupravy doplňkových dílů 45560 EV3 a síťový adaptér (8887).
Žádné rozměrové, ani váhové omezení není. Pro pohyb robota smí být použit jakýkoli způsob, včetně kluzného podvozku. Pro potřeby snímání se lze dotýkat základní desky stolu, pokud tato část není součástí pohybového ústrojí. Dosažený čas se počítá po dotyku hnacího ústrojí s cílovou čárou. Na start se robot umístí tak, aby hnacím ústrojím stál na startovní čáře.
Programování robota
Program robota může být napsán v jakémkoliv programovacím jazyce. Robot se po zahájení soutěže musí pohybovat samostatně, ovládání robota pomocí hlasu, bluetooth či jiných komunikačních kanálů není dovoleno.
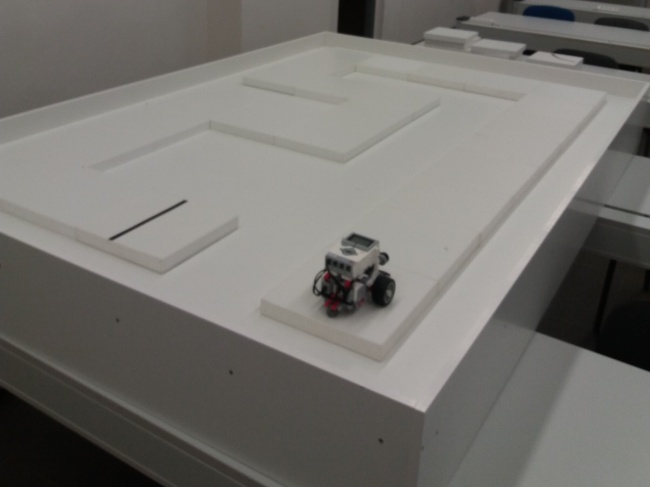
Hrací plocha
K dispozici budou dvě hrací pole. Hrací pole tvoří stůl o rozměru 9 x 6 polí. Rozměr pole je 28 x 28 cm. Po obvodu stolu je mantinel vysoký 8 cm nad desku stolu. Dráha bude sestavena z polí 28 x 28 x 4 cm. Pole se budou dotýkat pouze jednou celou hranou. Dráha nebude mít slepá ramena, nebude se křížit a jednotlivá pole se nebudou dotýkat rohy. Okraj pole bude od mantinelu stolu vzdálen minimálně 14 cm. Pro každé kolo bude mít dráha jiný tvar.

Průběh zápasu
Jízdy budou probíhat paralelně na dvou stolech. Stůl si soutěžící zvolí po vzájemné dohodě, nebo losem.
Před zahájením jízdy jsou roboti umístěni do pole Start tak, že nesmí překročit startovací čáru.
Po odpočítání startu se rozběhne časomíra a soutěžící spustí pohyb robota. Čas v cíli bude měřit fotobuňka.
Aktivaci je možné provést pouze jedním úkonem. V rámci aktivace robota není dovoleno provádět několik úkonů či měnit mechanickou konfiguraci robota. Je však dovoleno mít na robotovi více „aktivačních spínačů“, jejichž výběrem se určí například strategie. V každém případě je však nutné dodržet „jednoúkonový“ princip spuštění.
Doba jízdy je 90 sekund. Pokud robot opustí lávku – dotkne se kteroukoliv částí desky stolu, jeho jízda končí. Rozhodčí označí pole, ve kterém došlo k ukončení jízdy, nebo uplynutí časového limitu.
Soutěž proběhne ve dvou kolech. Po ukončení prvního kola se vytvoří předběžné pořadí a ve druhém kole se pojede od nejslabšího výkonu. Do celkového pořadí se započítává nejlepší výsledek z obou jízd. V případě shody se pojedou doplňkové jízdy a v případě další shody rozhodne los.
Úpravy robotů
Čas mezi jednotlivými zápasy mohou účastníci využít na libovolné úpravy (mechanické, softwarové atd.), musí se však do 1 minuty po výzvě dostavit k jízdě, jinak ztrácí právo na absolvování jízdy. V pořadí se pak tento účastník posune na poslední místo, popřípadě se bude počítat výsledek z prvního kola.
Diskvalifikace
Z jízdy může být diskvalifikován soutěžící, který nedodržel předepsané rozměry, použil nedovolené prvky, nebo se v nedostavil k jízdě v předepsaném čase.
Hodnocení jízd
- Nejkratší dosažený čas
- Nejdelší ujetá vzdálenost – počítají se pouze pole při pohybu k cíli, a to tak, že jedno pole se započítává pouze jednou. V případě, že se robot vrací, počítá se dosažené pole nejblíže k cíli.
Bezpečnost a omezení
Soutěžící startují na vlastní riziko, organizátor neodpovídá za jakékoliv vzniklé škody. Případné rozpadnutí robota v průběhu jízdy může vést k porušení podmínky maximálních rozměrů.